
自車位置精度
どんな状況においても、正確さを極めた自車位置精度。

最先端のカーナビを支える、
正確無比な自車位置精度を追求した
アドバンスドIQ高精度
精度の向上を司る自車位置専用システムを搭載【自車位置専用システム】
ナビゲーションを駆動させるメインCPUとは別に、自車位置精度の演算のみに使用する専用CHIPを
中枢とする自車位置精度専用システムを搭載。
最先端のGPSセンサー、ジャイロセンサー、加速度センサー、地図データから得る膨大かつ緻密なデータを高度に演算処理。
より複雑な演算処理が行えるため、より正確な自車位置精度の表示が実現します。
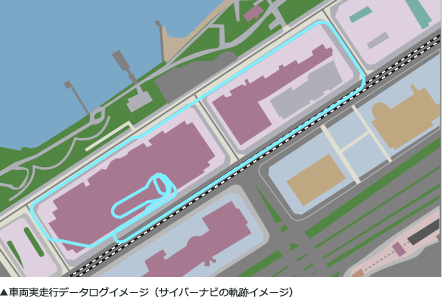
さらに、数多くの走行試験データのノウハウを反映させることで、
正確な自車位置表示が困難だった場所も飛躍的に精度が向上しています。

▲カーナビ基板に自車位置専用のスペースを確保。自車位置専用システム
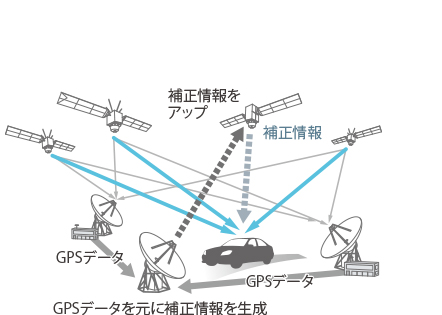
測位精度と受信感度の向上により
安定した位置情報を取得【「GPS・みちびき・グロナス・SBAS」対応】
あらゆるシチュエーションにおいて正確な自車位置を実現するため、精度が高く安定した位置情報の取得を可能にする、米国の「GPS」、日本の準天頂衛星「みちびき」、ロシアの衛星測位システム「グロナス」に対応。すべての衛星を同時に受信し、演算することで様々な場所や時間で、高精度な自車位置を測位することが可能です。さらに日本において2機の静止衛星から送信されているGPSの補正データ「SBAS」にも対応。これらの高度なシステムにより測位精度と受信感度が大幅に向上。さらに精度専用CHIPともあいまって、初回起動時の測位時間も短縮されているので、地下駐車場など電波が届かない場所から出た場合もすぐに正確な自車位置を捕捉します。
衛星が届きにくい場所でも
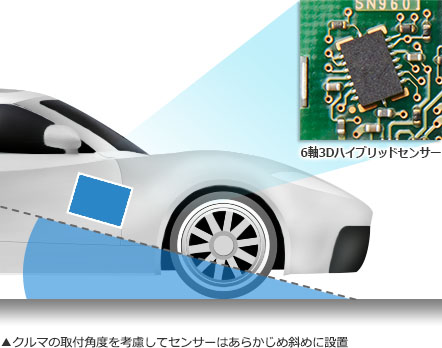
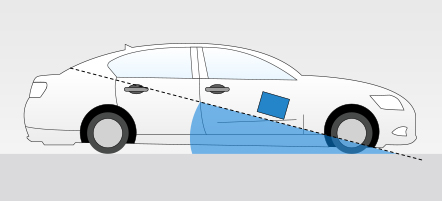
高度な技術で自車位置を判断【6軸3Dハイブリッドセンサー】
これまでの長年に渡るノウハウで積み重ねてきたセンサー技術のすべてを注ぎ込み開発された「6軸3Dハイブリッドセンサー」を搭載。「上下」「左右」「回転」方向のそれぞれ加速度・角速度の6軸を検知する高精度センサーにより、車両の挙動を細かく検知・演算し、補正性能を向上。自車位置がズレやすい高速道路の乗り降りや複雑なジャンクションなどにおいても、極めて誤差の少ないトレースを行います。また車速パルスを接続していない状態でも精度向上の機能が組み込まれているため、簡易ハイブリッド※の状態でも高い自車位置精度が可能となります。さらにクルマでの使用を考慮した回路設計や精度に影響をおよぼす熱対策による基板設計など精度へのこだわりが隅々にまで注がれています。
- ※車速パルスを接続しない場合は簡易ハイブリッドとなり、2D平面的なハイブリッド測位となります。
自車位置精度の向上は、誘導のタイミングや案内の精度にも大きく影響しています。

▲立体駐車場

▲トンネル

▲急カーブ

▲高架下

▲高速平行

▲高速入口(分岐)
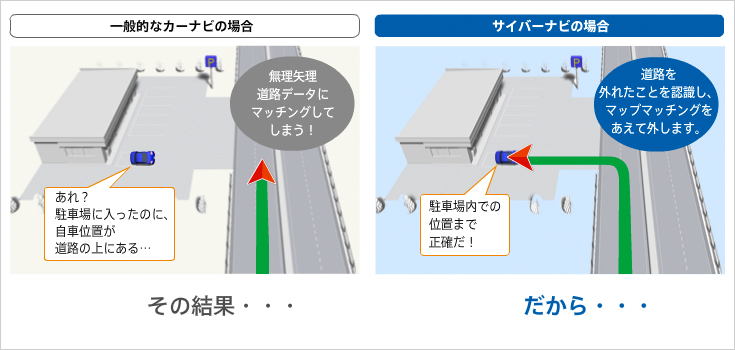
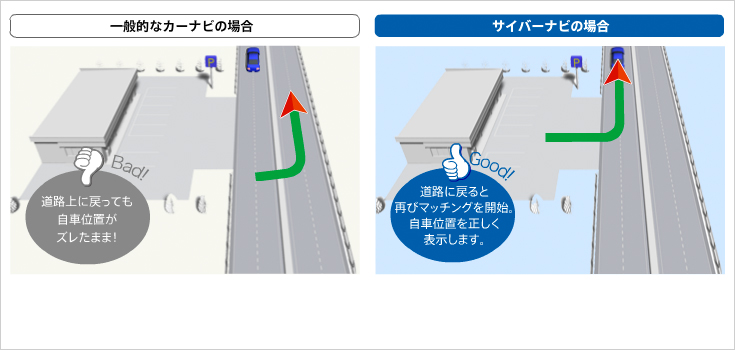
道路以外の走行も正確に認識【マルチフィールドマップマッチング】
一般的なカーナビと違い、旋回や速度変化などの車両の状態を速やかに考慮し、地図データを照会することで道路から外れたことを認識するサイバーナビ。コンビニの駐車場やガソリンスタンドなどの道路以外でも正確に自車位置を表示し、道を外れたことによる小さな誤差も見逃しません。

▲コンビニなどの小規模駐車場走行表示例
Flashムービーをご覧いただくには、Adobe Flash Playerが必要です。
立体駐車場に入ってもズレない【傾斜旋回補正アルゴリズム】
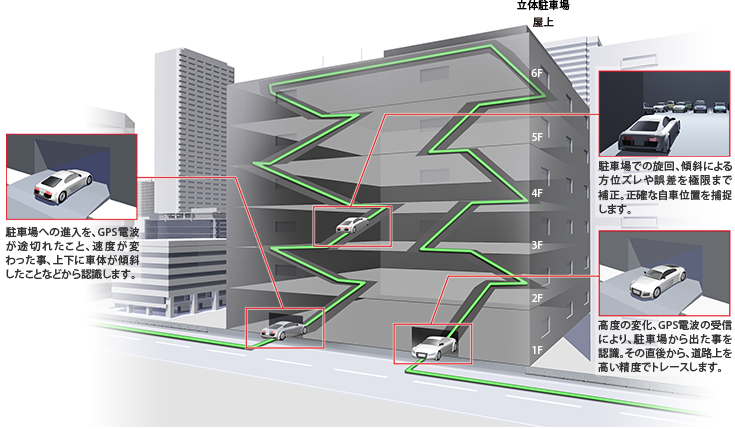
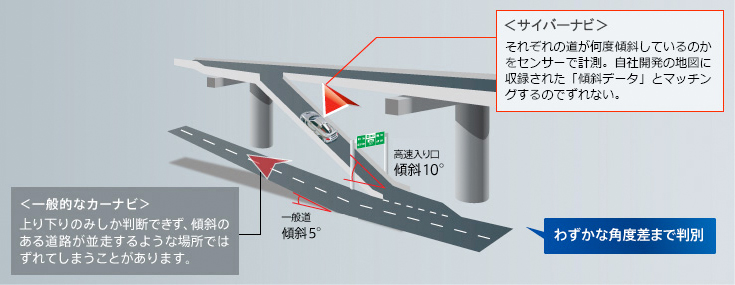
傾斜角度を判断し
自車位置を正確に見極める【3Dマップマッチング/傾斜データ】
一般的なカーナビは高速道路の入口など、道路が並走する場所では傾斜の角度差を判断できず自車位置が外れてしまうことがあります。サイバーナビは高性能の6軸3Dハイブリッドセンサーで判断した傾斜角度を地図データに組み込まれた独自の傾斜データと照合し、正確な自車位置を判断し、表示します。

▲自車位置がズレやすい並走する道路例
より滑らかに地図をトレース【10Hz測位】
1秒間に10回というスピードで自車位置の測位と地図上への表示を実施。地図フォーマットの刷新ともあいまって、カーブ走行時や誤認識しやすい分岐などでも、これまで以上に自車位置がズレることなく滑らかに地図上の道をたどります。
▲10Hz測位/5Hz測位比較イメージ
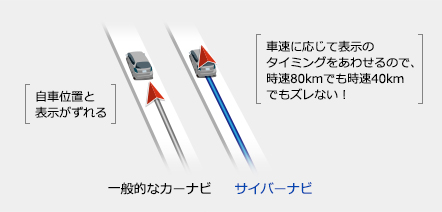
表示までの1秒の遅れさえも解消【表示位置補正】
様々な情報を基にした複雑な内部処理を行うため、自車位置の特定には約1秒間の表示遅延を要します。サイバーナビはこの自車位置の表示遅れも補正します。しかも単に表示を前方へ進めるのではなく、車速に応じて補正距離を計算し、画面描画するタイミングにあわせた自車位置表示までも可能にします。
クルマの条件に合わせて自動補正
カーナビを使用する環境や車種、使用状況は様々。
あらゆる条件に対応しなければ高い自車位置精度を保ち続けることはできません。
サイバーナビには、カーナビの取付位置やタイヤの変化などを、
過去の学習値から自動的に判断して補正する様々な独自技術を搭載しています。
車両情報の微妙な変化まで補正【センサー学習補正】
車種で異なる取付位置にも対応【取付角度自動補正機能】
車種によって異なるコンソールの上下の傾きにも対応。取付時に自動で角度補正を行います。また左右の取付向きを設定することで、コンソールが大きく左右を向くクルマでも、進行方向にまっすぐ取付けた場合と同様に、正確な自車位置認識が可能。左右いずれかのカーブ走行時のみ極端に発生する誤差を徹底的に排除します。
- ※車速パルスを接続しない場合は簡易ハイブリッドとなり、2Dの平面的なハイブリッド測位となります。長いトンネルに入った場合は正確な測位ができなくなることがあります。
▲正確な取付角度を自動認識
わずかなタイヤ変化にも自動で対応【タイヤ外径変化検出機能】
カーナビは、タイヤの回転数を基に検出される車速パルス信号を活用するため、タイヤ外径のわずかな変化でさえ自車位置の表示に影響を与えてしまいます。サイバーナビはタイヤの微細な変化や、夏/冬のタイヤ交換時、チェーン装着時の形状の違いまで自動的に感知。「6軸3Dハイブリッドセンサー」により素早く検出し、距離の学習値の誤差もより少なく、速やかに補正します。
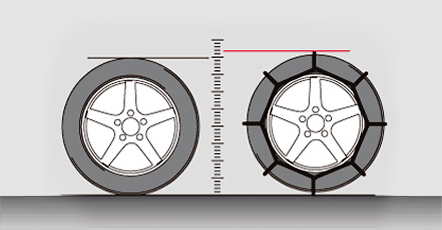
▲チェーン装着時の外径変化イメージ
- ■記載の仕様および外観は改善のため予告なく変更することがあります。また各ユニットの画面写真ならびに表示は、別売オプションを接続している場合があります。
- ■掲載の商品写真、取付例およびビジュアル等はすべて表現上のイメージです。写真の色(製品ボディ、イルミネーション等)は、サイトをご覧になるパソコン等の条件や設定などにより、実際の色と異なって見える場合があります。
- ■各画面写真はハメコミ合成で、色および仕様等は実際と異なる場合があります。また、画面内の表記は機能を紹介するために用いた架空のものもあります。