「カーナビの根幹」としてカロッツェリアがこだわり続けているのが、常に自車位置を正確に把握する精度の高さ。長年にわたり先進技術とノウハウを結集して実現した独自の"IQ高精度"は、地図上にない道路を自動作成する「ロードクリエイター」にも活かされています。 |
 |
一般的なカーナビと違い、サイバーナビは道路から外れたことを認識して正確に自車位置を表示。ロードクリエイターによる道路の自動作成にも役立っています。 |
|
 |
 |
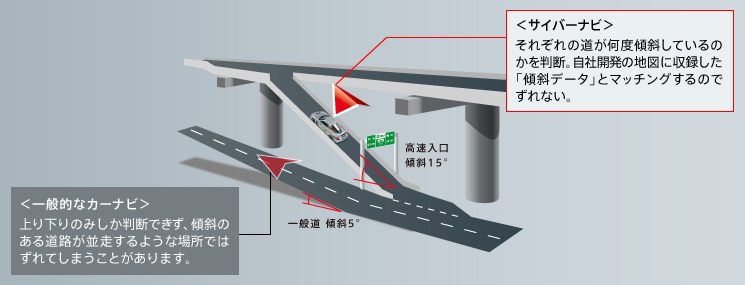
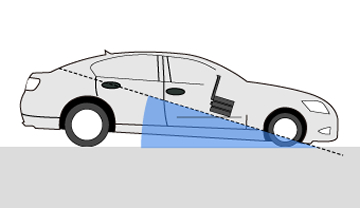
一般的なカーナビは高速道路の入口など、道路が並走する場所では自車位置が外れてしまうことがあります。サイバーナビは判断した傾斜角度を独自の傾斜データと照合し、正確な自車位置を表示します。 |
|
 |
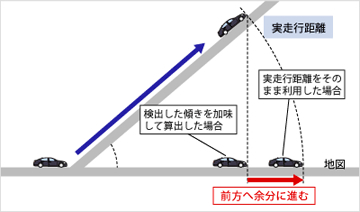 |
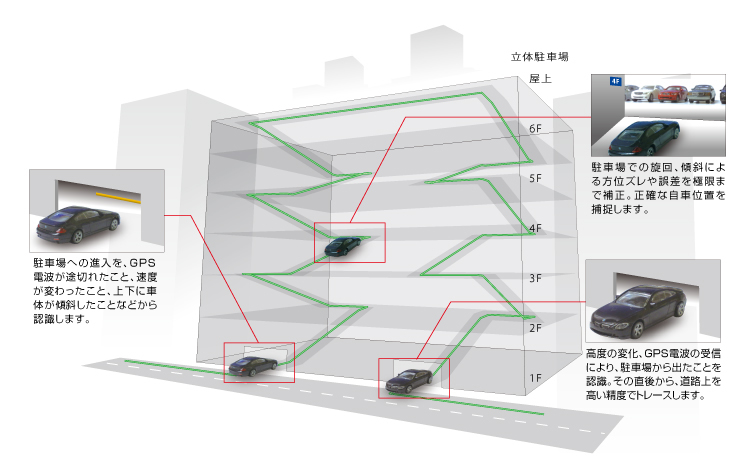
カロッツェリアが独自に開発した「傾斜型ジャイロセンサー」と「傾斜型Gセンサー」を搭載。立体駐車場に入るスロープはもちろん、立体交差や道路のわずかな傾斜でも、傾斜角や高低差を自動的に検出し、前後方向の位置誤差を補正します。 |
|
※車速パルスを接続しない場合は簡易ハイブリッドとなり、2Dの平面的なハイブリッド測位となるためIQ高精度となりません。長いトンネルに入った場合は正確な測位ができなくなることがあります。 |
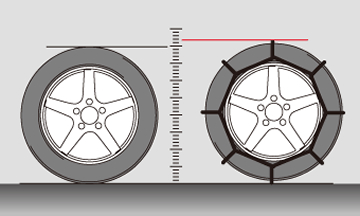 |
カーナビは、タイヤの回転数を基に検出される車速パルス信号を活用するため、タイヤ外径のわずかな変化でさえ自車位置の表示に影響を与えてしまいます。サイバーナビはタイヤの微細な変化や、夏/冬のタイヤ交換時、チェーン装着時の形状の違いまで自動的に感知し、距離の学習値を速やかに補正します。 |
|
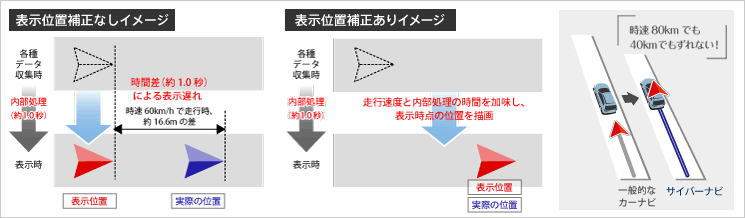
様々な情報を基にした複雑な内部処理を行うため、自車位置の特定には約1秒間の表示遅延を要します。サイバーナビはこの遅れを補正するため、あらかじめ描画時点の位置を表示。しかも単に前方へ進めるのではなく、車速に応じて補正距離を計算し、画面描画するタイミングにあわせた自車位置を表示します。 |
 |
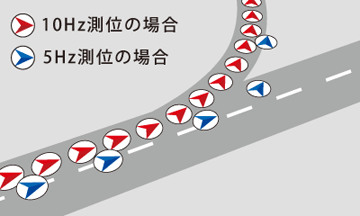 |
走行中も1秒間に10回というスピードで自車位置の測位を実施。カーブ走行時や誤認識しやすい分岐などでも自車位置が滑らかに地図上の道をたどります。 |
|
サイバーナビは単に緯度経度を計算するのではなく、各種センサーや様々な信号から刻々と得られるデータを基に、旋回や速度変化などの車両の状態を速やかに考慮。地図データと照合することで、道路から外れたことを認識しています。 |
長年に渡って培ってきた感度補正のテクノロジーにより、駐車場マップが収録されていなくても、ありとあらゆる場所において、正確な自車位置表示が可能です。 |
 |
![]()
カーナビを使用する環境、車種や使用状況は多岐に渡り、あらゆる条件に対応しなければ高い自車位置精度を保ち続けることはできません。サイバーナビには、カーナビの取付位置やタイヤの変化などを、過去の学習値から自動的に判断して補正する独自の技術を搭載しています。 |
サイバーナビは精度誤差の算出補正の要である3Dハイブリッドセンサーを常に監視し、学習補正を促すことで、高い自車位置精度を保ち続けることを可能にしています。 |
 |
ドライバーの操作性に配慮し、コンソールが大きく左右を向いた車種でも、進行方向にまっすぐ取付けた場合と同じように正確な自車位置が認識できるよう自動で補正。左右いずれかのカーブ走行時のみ極端に発生する誤差を徹底的に排除します。また車種によって異なる様々なコンソールの傾斜にも対応。取付時に角度設定することなく、自動的に角度補正を行います。 ※車速パルスを接続しない場合は簡易ハイブリッドとなり、2Dの平面的なハイブリッド測位となるためIQ高精度となりません。長いトンネルに入った場合は正確な測位ができなくなることがあります。 |
|
![]()