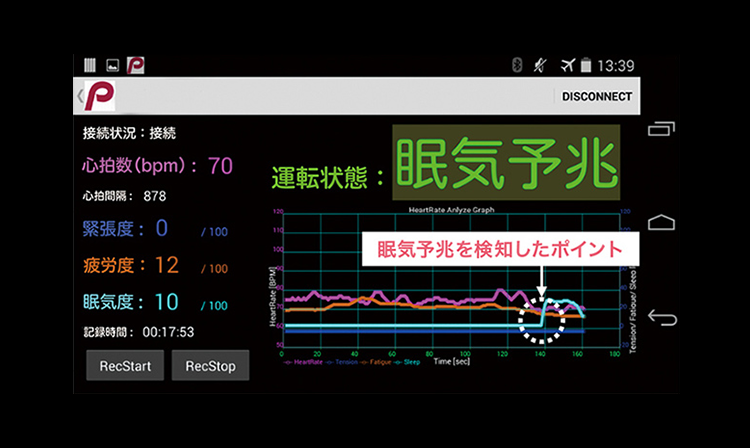
「行動予測技術」とは、個人の行動履歴や車内外で生じた過去の状況などから抽出される様々な行動パターンと、天気やドライバーの生体情報など刻々と変化する現在の状況を組み合わせることで、ドライバーや同乗者の先の行動を予測する技術です。
この技術は、例えば車が走り出すと、ドライバーが音声やボタンで車載機器を操作することなく、これから向かう目的地や、到着時刻などを自動的に予測します。その予測を基に、渋滞回避ルートやよく聴く音楽など、ドライバーや同乗者にとって最適な情報やサービスを、最適なタイミングで提供することが可能になります。また、走行中には、カーナビゲーションシステムの地図の拡大・縮小などドライバーがよく行う操作も本技術が予測し、その操作を自動的に行うことで、ドライバーの操作負荷を軽減することも可能です。この行動予測技術では、予測の精度を向上させるために機械学習※を活用しています。
さらに、人の視覚による認知や判断を推測する「画像認識技術」の研究開発にも取り組んでいます。人が車内から前方を見る際に注目する部分や、注目する順序、それらから認識される渋滞などの状況を、車載カメラで撮影した前方画像の動きや色合いから推測し、判断します。この技術で認識した状況を、前述の「行動予測技術」に取り入れることで、より人の感覚に近い、適切な予測が可能になります。
当社は、自動運転時代における安心・安全で快適なカーライフの実現に向けて、これからも「行動予測技術」と「画像認識技術」の開発に取り組んでいきます。
※ 機械学習:蓄積されたデータを繰り返し学習し、特定のパターンを見つけ出す技術