
もくじ
誤差について
次のような状況のときは、誤差が大きくなることがあります。
GPS測位不可による誤差
-
次のような場所にいるときは、GPS衛星の電波がさえぎられて受信できないため、GPSによる測位ができないことがあります。

-
次のような場合は、電波障害の影響で、一時的にGPS衛星の電波を受信できなくなることがあります。
-
車載のテレビで56チャンネル(UHF) を受信している。
-
GPSアンテナの近くで自動車電話や携帯電話を使っている。
-
-
GPSアンテナにペンキや車のワックスを塗らないでください。感度が低下したり、電波を受信できなくなることがあります。また、アンテナに雪が積もると感度が低下しますので、除雪してください。
GPS衛星自体による誤差
-
捕捉(受信)できている衛星の数が少ないときは、2次元測位となり誤差が大きくなります。
有料・高架道路での誤差について
有料道を乗り降りするときや、高架道路、立体交差の道路を走行するときは、勾配を検知して距離補正をします。勾配データが収録されていない道路では、補正されないため誤差が大きくなることがあります。
低速時の自車位置精度について
車種により時速数km程度の低速時に車速信号が出力されないものがあります。そのような車種では、渋滞中や駐車場(地下駐車場など)で時速数km程度の低速走行が続くと、自車位置が正確に表示されないことがあります。
駐車場マップについて
-
車速パルスを接続していない簡易ハイブリッドシステムでは、位置精度が確保できない(上り下りの測位ができないなど)ため、正常に動作しません。
-
以下のような走行状況では、駐車場マップに切り換わらないことがあります。
-
しばらく右左折せずに長距離走行したあとに進入した場合
-
U ターンするような方向で進入した場合
-
バック信号が接続されていない場合
-
時速数km程度の低速で車速パルスが出力されない車種の場合
-
収録されていない駐車場経由で進入した場合
-
新設された入口から入場した場合
-
その他の誤差について
-
角度の小さなY字路を走った場合。

-
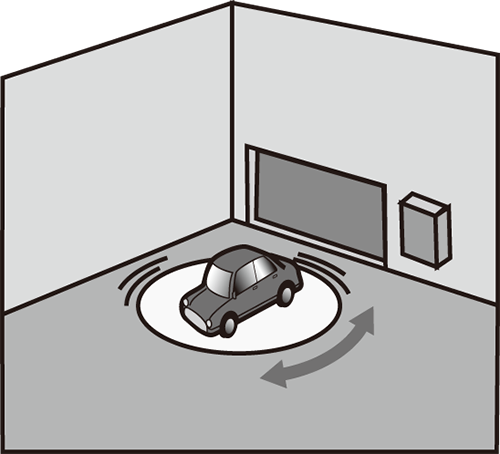
駐車場などで、ターンテーブルでの旋回を行った場合。
-
地図情報にはない新設道路を走った場合。

-
直線や緩やかなカーブを、長距離走ったすぐあと。

-
ヘアピンカーブが続いた場合。

-
フェリーや車両運搬車などで移動した場合。

-
砂利道や雪道などで、タイヤがスリップした場合。

-
道路が近接している場合(有料道路と側道など)。

-
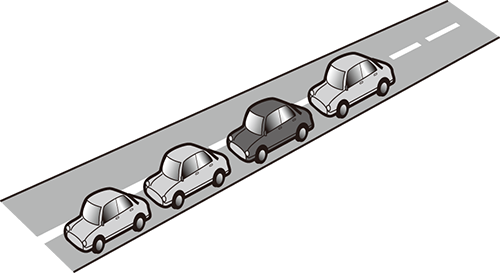
渋滞などで、低速で発進や停止を繰り返した場合。
-
蛇行運転をした場合。

-
立体駐車場などで旋回や切り返しを繰り返した場合。

-
碁盤の目状の道路を走った場合。

-
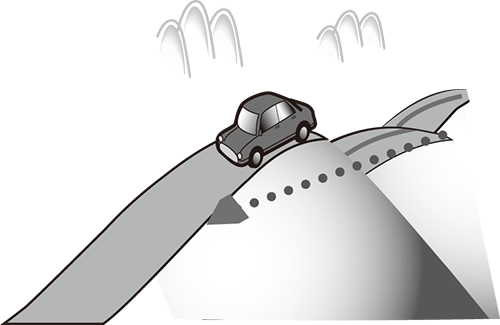
勾配の急な山道など、高低差のある道を走った場合。
-
GPSによる測位ができない状態が長く続いた場合。

-
チェーンを装着したときや、サイズの違うタイヤに交換した場合。

-
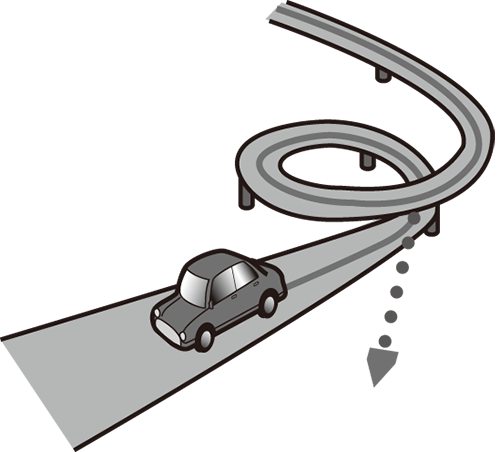
ループ橋などを通った場合。
-
工場などの施設内の道路を走行中、施設に隣接する道路に近づいた場合。
-
エンジンをかけてすぐに走行しはじめた場合。
-
扁平率や径の異なるタイヤに交換して間もない場合。