測位の精度を高めるためのしくみ
AVIC-CQ912II-DC/ AVIC-CL912II-DC/ AVIC-CW912II-DC/ AVIC-CZ912II-DC/ AVIC-CQ912II/ AVIC-CL912II/ AVIC-CW912II/ AVIC-CZ912II
3Dハイブリッドセンサーの役割
内蔵の3Dハイブリッドセンサーは、自立航法自体の測位精度を高めるために、高精度3Dハイブリッドシステムで活用されています。
高精度3Dハイブリッドシステム
車速パルスが入力されているときは、3Dハイブリッドセンサーで高度差を検出できるため、高精度な測位が可能です(高精度3Dハイブリッドシステム)。
簡易ハイブリッドシステム
車速パルスが入力されないときは、簡易ハイブリッドシステムで測位します。簡易ハイブリッドシステムでは、3Dハイブリッドシステムより精度が低くなります。道路の傾斜の影響を受けやすいため、長いトンネルや地下駐車場などGPSが長い間受信できない状況では、誤差が大きくなることがあります。
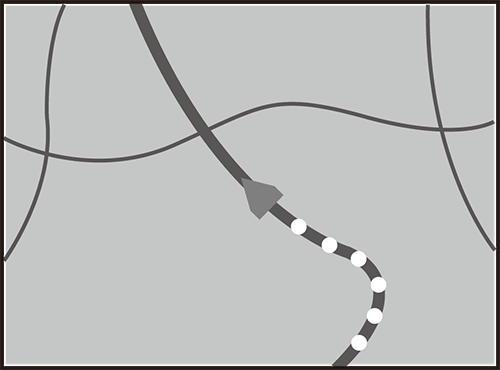
マップマッチング
GPSや自立航法による測位には誤差が生じることがあるため、現在地が道路以外になることがあります。このようなとき、「車は道路上を走るもの」と考え、現在地を近くの道路上に修正する機能がマップマッチングです。
マップマッチングしている場合
-
本機では、GPSと自立航法で精度の高い測位をした上でマップマッチングが働くため、さらに正確な現在地表示が可能です。
-
シティマップで道路が表示されていても、その道路をルート探索またはその道路にマップマッチングできない場合があります。