パイオニアは世界で初めてGPS市販カーナビゲーションを発売(1990年5月新聞報道)して以来、継続的にGPS受信の技術開発を続けてきました。受信環境に左右されない測位性能の確保を実現するための車載用位置フィルタのアルゴリズムは10年以上に渡って研究、開発が続けられています。その長年の研究に支えられた高い位置精度を発揮します。楽ナビには、この自社開発の技術が息づいているのです。
精度専用CHIP
メインCPUとは別に精度関連の処理だけを行う専用CHIPを搭載していま。
5ヘルツ測位
| 1秒間に5回というスピードで自車位置の測位を行い、常に高い自車位置精度を確保します。なめらかで見やすい自車位置描画を実現します 。カーブ走行時や分岐などでも、自動車位置が滑らかに地図上の道をたどります。 |
 |

▲分岐点での5ヘルツ測位 |
高感度8chGPS
同時に8つの衛星から測位電波を高感度受信することができるため、高い測位確率と位置精度を発揮しました。
マルチパス対策(リアルハイブリッドマルチパス検出・除去)
高性能・高感度のGPSレシーバー&GPSアンテナ
1度捉えた位置測定用の電波(GPS電波)が高層ビルなどによって途切れても、予測軌道計算をしてすばやく再捕捉できるピンポイントサーチなどを実現します。

楽ナビには、パイオニア技術者が徹底してこだわった高精度な各種センサーが内蔵されています。その開発に当たっては、以下のようなポイントが考慮されています。
・道路形状への対応
クルマの動きは道路形状の影響を大きく受けます。そのため、あらかじめ様々な道路形状を想定し、それらに対応するための処理アルゴリズムを開発。
・取付状態への対応
様々な車種への取付を前提とした市販カーナビゲーションであることを念頭に、取付状態への柔軟な対応力を実現しました。コンソールへの40度取付対応や低速車測パルス抜け車への対応、状況により激しくアップダウンする車室内温度への対応など、あらゆる環境へ対応しながらも高い位置精度の維持を可能にしました。
・デバイスへのこだわり
開発コストやサイズよりも性能を優先して開発に取組んでいます。その結果、自らカーナビに必要なデバイスを導入(傾きデバイス)するなど、カスタマイズの領域までも到達しています。なお、加速度センサーは、1997年より導入しています。
クリスタル3Dハイブリッドセンサー
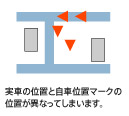
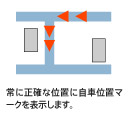
傾斜旋回補正(ジャイロセンサーの感度補正アルゴリズム)
| GPSが受信できない立体駐車場や地下駐車場などでは、急なスロープや場内での旋回など、めまぐるしく位置が変化します。楽ナビではこの環境でも、常に高い自車位置精度を保持するため、傾斜旋回補正を行っています。 |
|
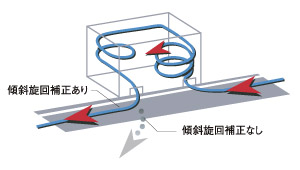
▲傾斜旋回補正効果のイメージ |
タイヤ外径変化検出機能
季節の変化に伴うタイヤの微細な変化や、夏/冬の交換時やチェーン装着時の形状変化や感知します 。
取付角度補正機能
| 左右方向にプッシュ部が大きく傾いた車種でも、正しい角度に補正する機能です。 |
|

▲取付角度補正画面 |
エクセレント学習
走行直後のジャイロセンサーの状態や温度上昇による影響を学習することで、走行スタート直後の精度を大幅に改善しました。

ドライブシーンは、人によってさまざまです。道路以外の場所を走行することを踏まえ、山モード、各駐車場モードなど、各エリアに最適なアルゴリズムを構築。その性能は、GPSの届かない地下駐車場や交差点に面した駐車場に進入したことも確実に認識します。
開発者自らが走行して作成した「地図データ」
地図データは、開発者自らが調査、収集し、修正まで一貫して行っています。また、とりわけ交差点や分岐点などの誘導上、重要な箇所のデータの採集は開発者自らが車で走行し、行っています。