本サイトはスタイルシートを使用しております。
お客様がご使用のブラウザはスタイルシート非対応のため、表示結果が異なっておりますが、情報は問題なくご利用いただけます。
| カロッツェリアトップ > 生産終了 > サイバーナビ > 機能詳細 > 自車位置精度 |
|

|
|
|
|



| どんなに最適なルートを案内しても、どんなに美しく見やすい地図を実現しても、正確に自車位置を認識できなければ優れたカーナビゲーションとは言えません。カロッツェリアはどこに移動しても正確に自車位置を表示することを目指し、特に困難な立体駐車場や地下駐車場に着目し難題を克服。独自の技術を結集した「IQ高精度」を実現しました。通常の道路のみならず過酷とも言える条件下においてもズレることのない、群を抜く高い自車位置精度を発揮します。 |
| 立体駐車場や地下駐車場は、自車位置を正確に認識することが非常に困難な環境です。それはGPS電波が届きにくい上に、旋回や傾斜が多く、道路の傾斜角や高低差を自動的に検出するジャイロセンサーに微妙な誤差が出てしまうためです。この誤差を補正するのがジャイロセンサーの「傾斜旋回補正アルゴリズム」。長年に渡って培ってきたノウハウの積み重ねが可能にした感度補正のテクノロジーにより、GPS測位が困難な場所でも正確な自車位置を表示しつづけることを可能にしています。 |
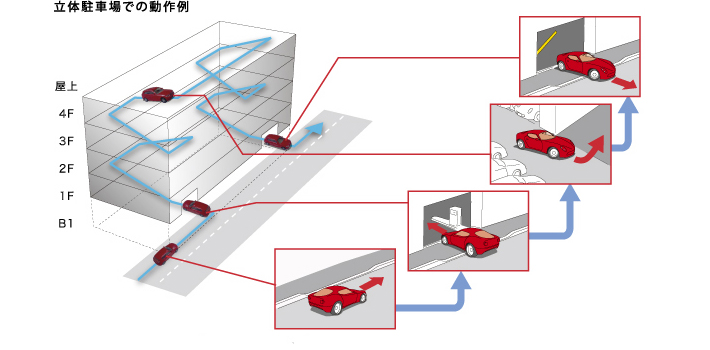
| ※ 傾斜旋回補正は地図データによらず、全国どこでも機能します。 |
| カーナビの位置精度が低下する原因のひとつに、道路以外の場所を正確に認識できないことが挙げられます。それは自宅の駐車場など、身近な場所でも起こり得るわずかな自車位置のズレが、道路の上での致命的な位置ズレにつながるからです。その問題を解決するため、あらゆる場所で正確に自車位置を認識するロジックが「マルチフィールドマップマッチング」です。車両の旋回や速度変化などを速やかに考慮し、道路から外れたことを認識。駐車場や空き地などの道路以外の場所でも自車位置を正確に地図上に表示します。単に道路上を考えるだけでは成し得ない、カロッツェリアだからこそ実現できる基本性能のひとつです。 |

| あらゆる条件において常に正確な自車位置を表示しつづけるため、パイオニアは長年に渡って様々な検証と調整を繰り返してきました。中でも受信環境に左右されない測位性能の確保を実現するための車載用位置フィルタのアルゴリズムは、10年以上に渡って研究、開発がつづけられています。その高い測位性能に加え、パイオニア技術者が徹底してこだわった高精度な各種センサーを内蔵。サイバーナビには長年の研究に支えられた技術が息づいているのです。 |
| 精度専用チップに採用されているサーチエンジンは、カーナビ起動時から自車位置把握に必要な衛星の捕捉を短時間で行い、速やかな自車位置表示を実現します。さらに走行中も、1秒間に10回というスピードで自車位置の測位を行うことで、圧倒的な位置精度の高さに貢献。カーブ走行時や誤認識しやすい分岐などでも自車位置が滑らかに地図上の道をたどります。 |
 ▲精度専用チップ |
 ▲圧倒的な位置精度の高さに貢献 |
| 高層ビルなどに反射することで生じるGPS電波の測位誤差(マルチパス)。サイバーナビはGPS電波から得られるGPS速度と車両信号から得られるセンサー速度の差を監視し、この自車位置精度の劣化原因ともなる測位誤差を検出、除去。入り組んだビルが建ち並ぶ都市部などでも正確にGPS電波からの情報を受信します。 |
 ▲ビルからの反射によるGPS電波の誤差も補正し、精度を維持 |
 ▲GPS受信状況画面表示例 |
| カロッツェリアが独自に開発した「傾斜型ジャイロセンサー」と「傾斜型Gセンサー」を搭載。高速道路に入る上り坂や、地下駐車場に入る下り坂はもちろん、立体交差や道路のわずかな傾斜でも、傾斜角や高低差を自動的に検出し、前後方向の位置誤差を補正します。さらに様々な車種への取付けを加味し、あらかじめ検出軸を傾けた状態に形成することで、上向き最大40度までのコンソールの傾きに対応しながら、その能力を発揮します。 |
 |
 ▲傾斜型ジャイロセンサー |
 ▲傾斜型Gセンサー |
 ▲車両の傾斜を正確に把握 |

| 位置精度に関わる様々なテクノロジーを発揮させるには、正確な道路データの整備が欠かせません。カロッツェリアでは幹線道路から細街路まで、あらゆる道路の正確な地図表示に加え、並走する高速道路と一般道路の傾斜、立体駐車場や地下駐車場のデータなど、自車位置精度に影響する地図データを積極的に整備。これらの長年に渡る積み重ねにより、高度な技術を活かしきる、膨大な地図データを収録しています。 |
| 全国主要都市の地下駐車場および立体駐車場120ヵ所の専用地図「駐車場マップ」を収録。駐車場の出入口の傾斜を感知すると自動的に切換わり、駐車場内でも駐車と自車位置が限りなく一致。エレベーターや階段の位置まで的確に把握することが可能です。さらに複数階に渡る駐車場でも、走行階を判断して各階のマップを自動的に切換えて表示。複雑な駐車場でも迷うことなく利用できます。 |
 ▲駐車場マップ走行画面表示イメージ |
|
|
| ブレインユニットに収録したカーナビの基本となる地図データは、累計約200万kmにもおよぶ道路調査で得た、現地調査でしかわからないリアルで詳細な情報を反映して作成。幹線道路から細街路まで網羅した正確な道路データが、高い自車位置精度を支えています。 |
 ▲細街路表示例 |

| 温度変化や振動など、カーナビを使用する環境は一定ではありません。さらに車種や使用状況は多岐に渡り、取付位置や得られる信号は千差万別。これらのあらゆる条件に対応しなければ、高い自車位置精度を保ちつづけることはできません。サイバーナビには、カーナビの取付位置やタイヤの変化などを、過去の学習値から自動的に判断して補正する独自の技術を搭載。意識しなくても、誰もが高い自車位置精度を得られるよう配慮しています。 |
| 車両から得られる自車位置情報をとりまく環境は常に一定ではありません。サイバーナビは精度誤差の算出補正の要である3Dハイブリッドセンサーを常に監視し、学習補正を促すことで、高い自車位置精度を保ちつづけることを可能にしています。 |
| カーナビは、タイヤの回転数を基に検出される車速パルス信号を活用するため、タイヤ外径のわずかな変化にも自車位置は影響を受けてしまいます。サイバーナビは「タイヤ外径変化検出機能」により、タイヤの微細な変化や、夏/冬のタイヤ交換時、チェーン装着時の形状の違いまで自動的に感知し、距離の学習値を速やかに補正。自車位置のズレが起こらないよう常に監視しています。 |
 ▲チェーン装着時の外径変化イメージ |
| ドライバーが操作しやすいよう、コンソールが大きく左右を向いた車種でも、進行方向にまっすぐ取付けた場合と同じように、正確な自車位置が認識できるよう補正する「取付角度設定機能」。左右いずれかのカーブ走行時のみ極端に発生する誤差を徹底的に排除します。また車種によって異なる様々なコンソールの傾斜にも対応。取付時に角度設定することなく、最大40度まで自動的に正確な角度補正を行います。 |
 ▲取付角度補正設定画面例 |
| カーナビの位置精度に影響を与える要因は多岐に渡ります。たとえば真冬の極寒から炎天下の猛暑など、大きく変化する車室内温度により、常温での使用だけでは想定できない部品特性の変化が微妙な誤差を生み出します。また特定の車両で発生する不規則な車速パルス信号により、単純な信号処理だけでは正確な移動距離は計れません。こういった様々な状況にも対応しながら、高い自車位置精度を保つことを目指し、あらゆるパーツの選定から独自のテクノロジー開発まで、日々取組みつづけています。 |
 |
|
|
|
|
|
|